전문분야
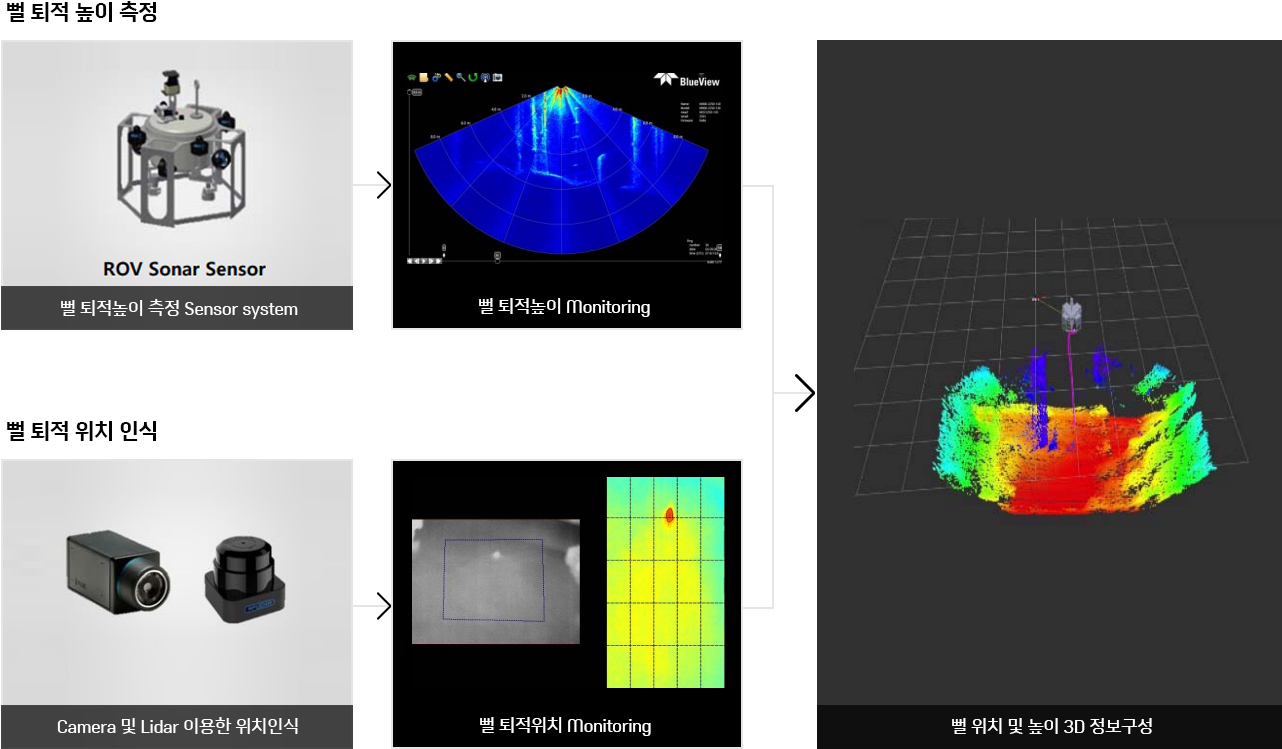
뻘 퇴적높이 3D 맵핑 개요도
제품(기술) 개요
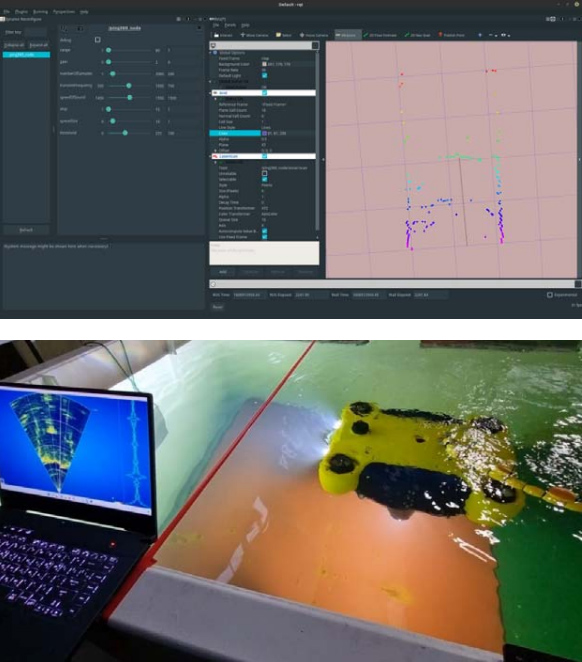
- · 초음파센서 벤더사 제공 API 라이브러리를 활용하여 초음파 스캔 데이터를 ROS(Robot Operating System)포맷으로 변경하여 헤드드론 내부 데이터 처리 시스템에서 수집된 값을 연산 처리하도록 개발
- · 소나 데이터를 포인트클라우드 방식의 군집화를 하여 특정 강도 이상의 값에 한정하여 취득된 데이터중 사용자 지정 거리 범위에 따라서 색상으로 분리하여 시각화하도록 개발
제품(기술) 개요
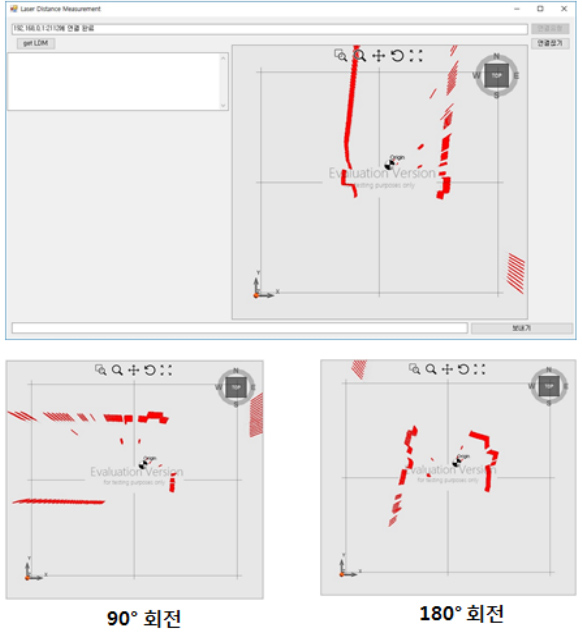
- · 2D Lider를 수중이동체의 상부에 설치하여 주변 벽면 및 구조물 인식
- · 개발 플랫폼 : Robot Operating System (로봇 개발 메타 운영체제)
- · ROS(Robot Operating System) 모듈 구성 및 통신 아키텍쳐)
- · 원하는 접근반경 거리 근접시에 경고 및 추돌위험 메시지 알림
제품(기술) 개요
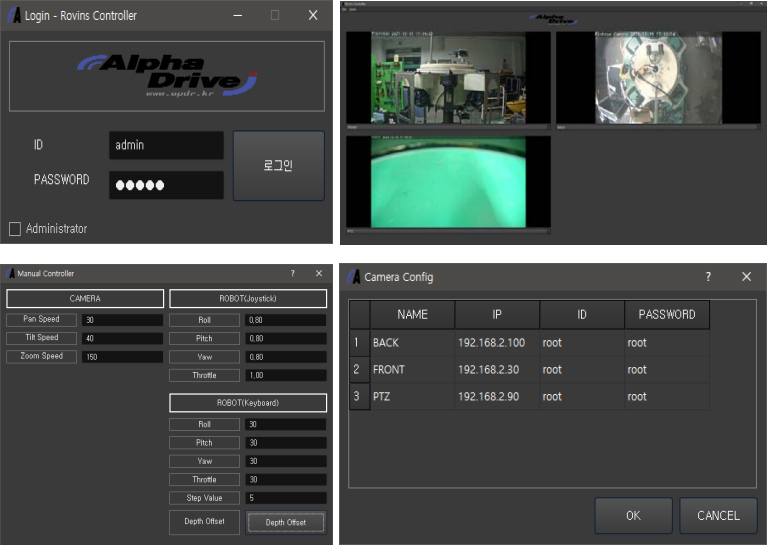
- · 오픈소스 오토파일럿 플랫폼(PX4) 기반 코드 커스터마이징 및 운전 모드 추가(거리유지 모드), 제어 설정 (Roll/Pitch/Yaw) 튜닝 작업
- · 드론 내부 시스템을 로보틱스 플랫폼(Robot Operating System) 으로 포팅 작업. 내부 통신 프로토콜을 MAVLink를 ROS 데이터 포맷으로 Wrapping 하여 통신도록 변경하여 로보틱스 기반 센서 데이터 및 제어 통신 프로토콜로 통합함
- · 드론 제어 소프트웨어 고도화 수행. 수중드론에서 수집되는 영상 (전방PTZ/하부)등 다양한 영상 및 센서 데이터를 디스플레이하는 전용 프로그램 개발. 전용 프로그램은 윈도우/리눅스 지원하며 사용자 운행 기록을 데이터베이스 저장하는 기능을 추가